今回は、曲げセンサーについて詳しく解説していきます。

指の曲がりや関節の角度を“見える化”できるセンサー、それが曲げセンサーです。名前の通り、物体が曲がったときの変位を計測できます。
まだまだニッチな存在ですが、最近ではその柔らかさやしなやかさを活かして、リハビリやVR、ロボット制御など幅広い分野で活用が広がっています。
今回は「抵抗方式」と「静電容量方式」の2種類の曲げセンサーを実際に使い比べました。それぞれにどのような特長があるのか、検証していきます。
本記事と合わせて動画も公開しておりますので、そちらの方も併せてご覧ください。
曲げセンサーとは?
曲げセンサーの一般的な特徴
曲げセンサーは一般的に、以下のような特徴を持っています。
- 柔軟性が高く、フレキシブルなシート状の構造をしている
- 物理的な曲げや変形に対して何らかの電気的特性の変化(抵抗値や静電容量の変化など)を示す
- 精密な測定よりも大まかな変化の検出を目的としている
こういった特徴から、曲げセンサーは以下のような利用シーンで活躍します。
- ウェアラブルデバイスへの組み込み
- 柔軟な可動部を持ったロボットの機構部や、リンク部分の角度や変形の検出
- 人間の動作をトレースするモーションキャプチャシステム
エンコーダーとの差異
例えばロボットの関節の角度を知りたい場合、より精密な角度センサー(エンコーダーなど)を用いるのが一般的です。
しかしエンコーダーなどの角度センサーは精度が高い反面、通常はしっかりと固定できる場所に設置して使う必要があります。
しかし、人間の身体のような柔らかくて複雑な形状を持つ物体に対しては、そうした角度センサーを固定することは困難です。そのため、そういった場所には自由に取り付けることができる曲げセンサーを使用します。
「曲げ」を測定したいのか、「角度」を測定したいのか、目的によって適切なセンサを選定する必要があります。
曲げセンサーの「抵抗式」と「静電容量式」の特徴と比較
ここでは市販されている曲げセンサーの特徴について、種類ごとに解説します。
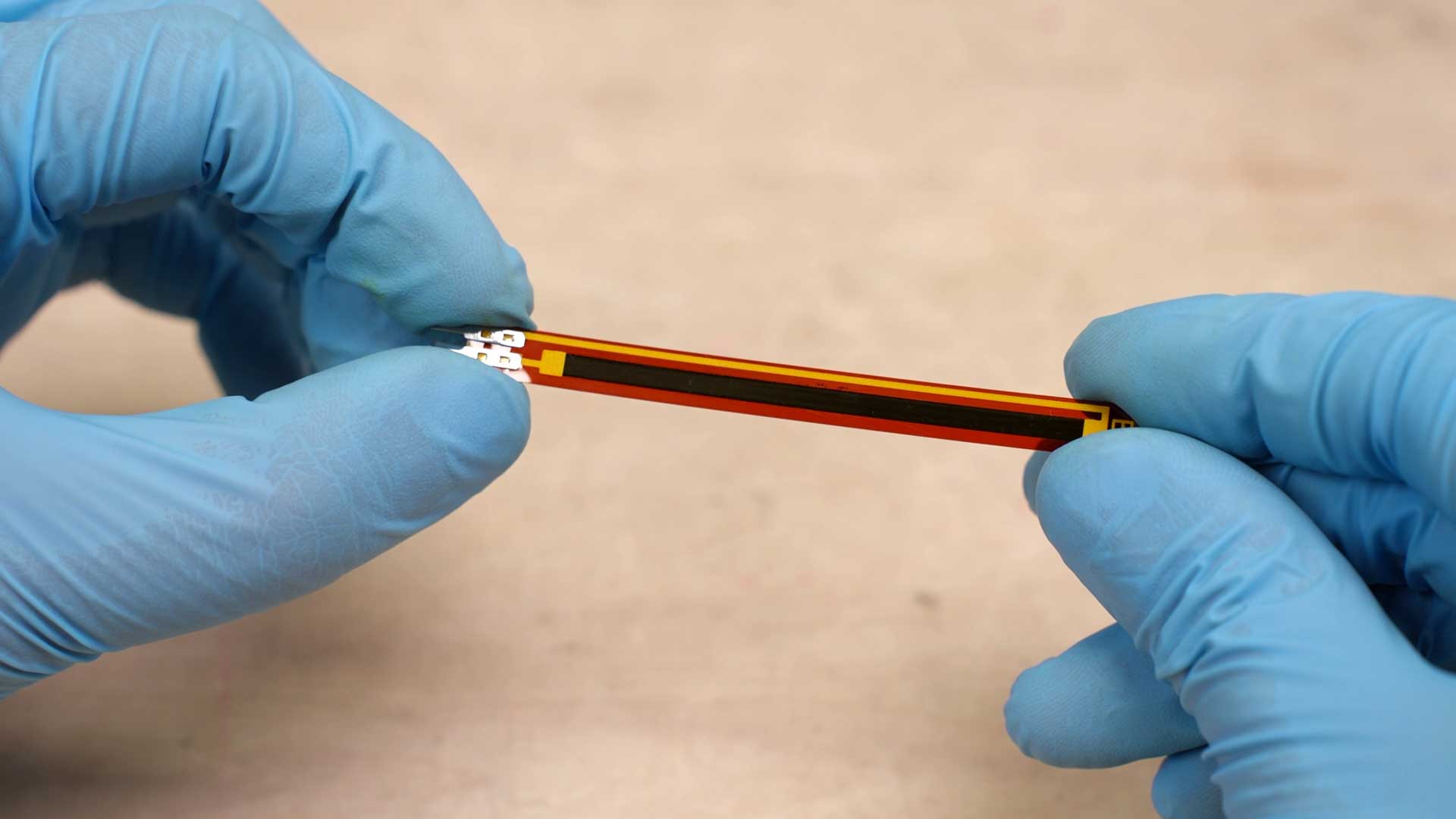

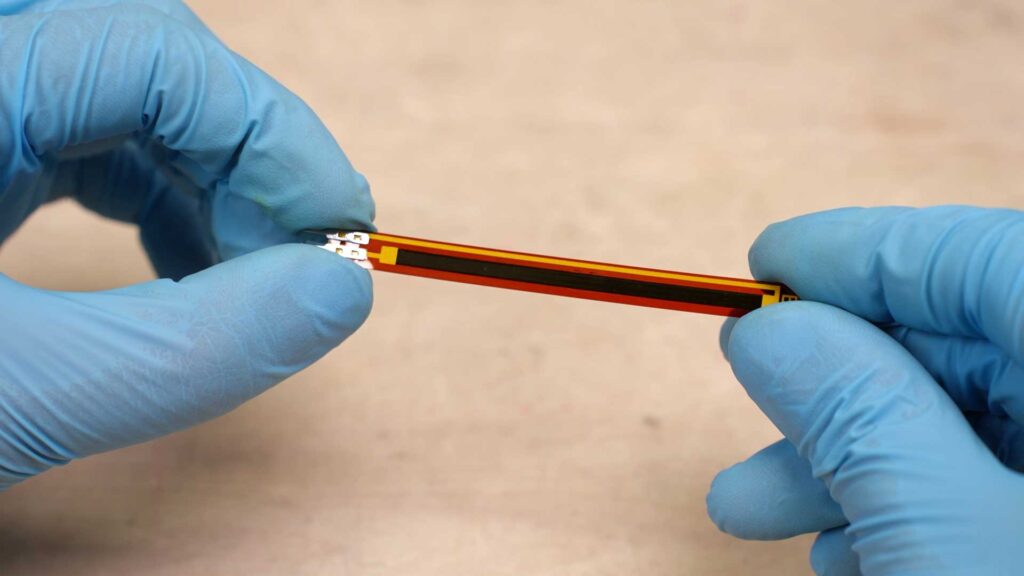
抵抗式
まずは抵抗式の曲げセンサーの特徴について見ていきます。秋月電子通商で購入できるくらい一般的なものです。
この方式では抵抗値が変化することで曲げを検出します。
例えば、金属線を引き伸ばすと抵抗値が増えます。これは金属線の断面積が小さくなるためです。断面積と抵抗値は反比例の関係にあります。
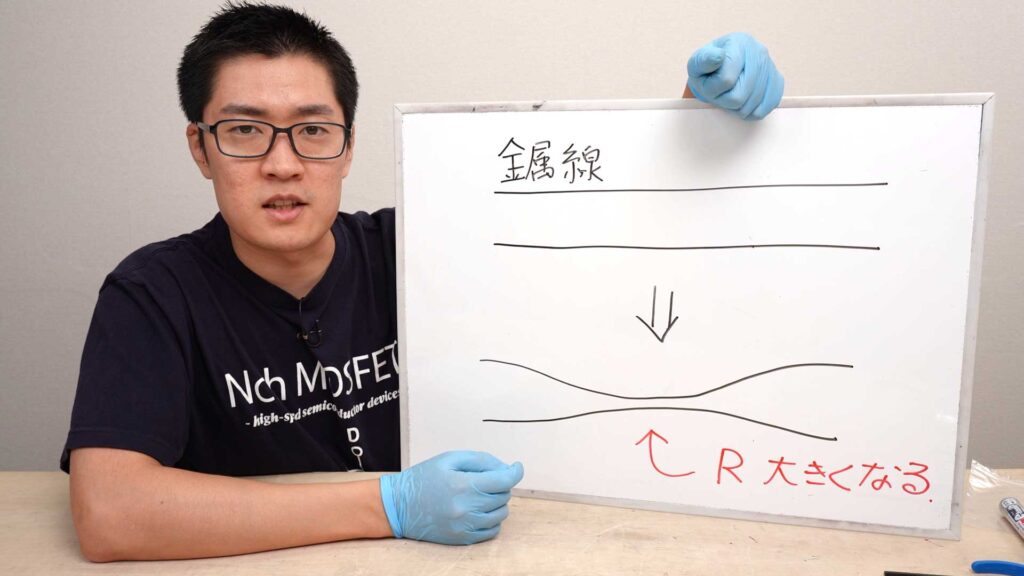
この原理を応用しているのが抵抗体式の曲げセンサーです。
抵抗式の動作原理
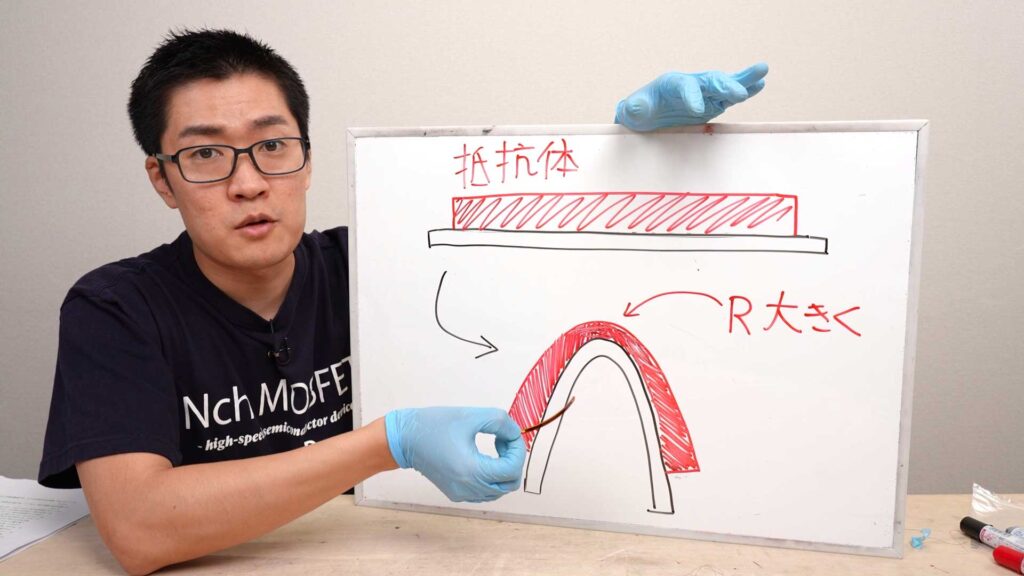
抵抗式の曲げセンサーは、シート状の母材の上に抵抗体となる導電性の塗料を塗った構造になっています。
このセンサーを曲げると、局面の外側の塗料が伸び、薄くなることで抵抗値が大きくなります。この原理を利用して曲がり具合を測定しているのが抵抗式の曲げセンサーのしくみです。
この抵抗値を使った計測方法は非常に簡単なため、一般ユーザによる趣味の電子工作などでもよく使われています。
ただし、扱いが簡単である一方で、この方式には欠点もいくつかあります。
第1に、ここで紹介している製品では、片側への曲げしか検知することができません。それは片面のみに抵抗体が付いているためであり、この問題は両面に抵抗体を塗ることで解決できます。
第2に、抵抗体の抵抗値が温度によって変化するという点です。これについて次の章で解説します。
抵抗式曲げセンサーの問題点
抵抗式曲げセンサーの抵抗体として使われる塗料には、一般的には温度係数の低い材質が用いられていますが、それでも温度変化の影響は完全には避けられません。
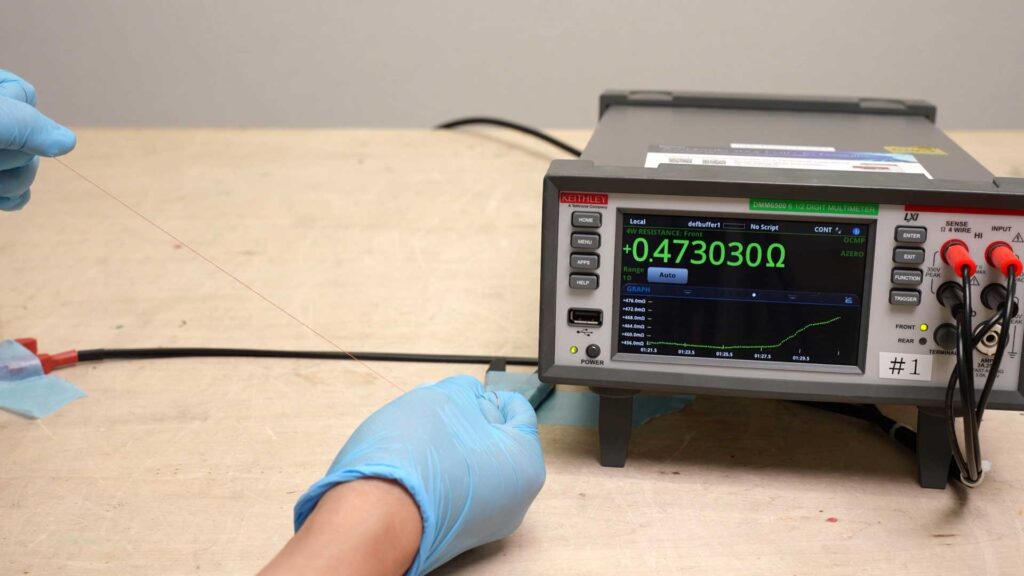
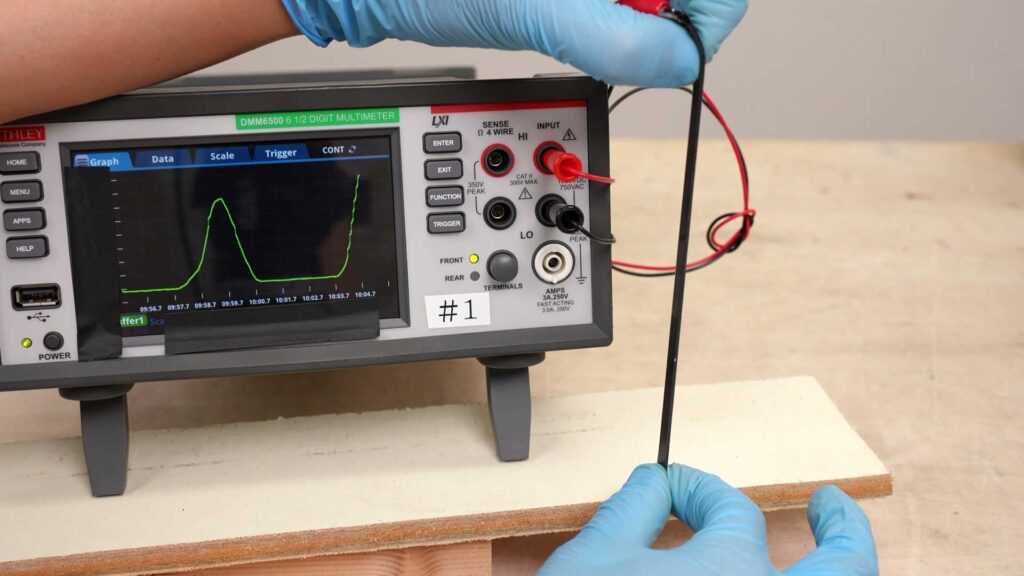
直線状態に固定した抵抗式曲げセンサーをヒートガンで加熱すると、画像のように抵抗値が変化している様子が確認できます。
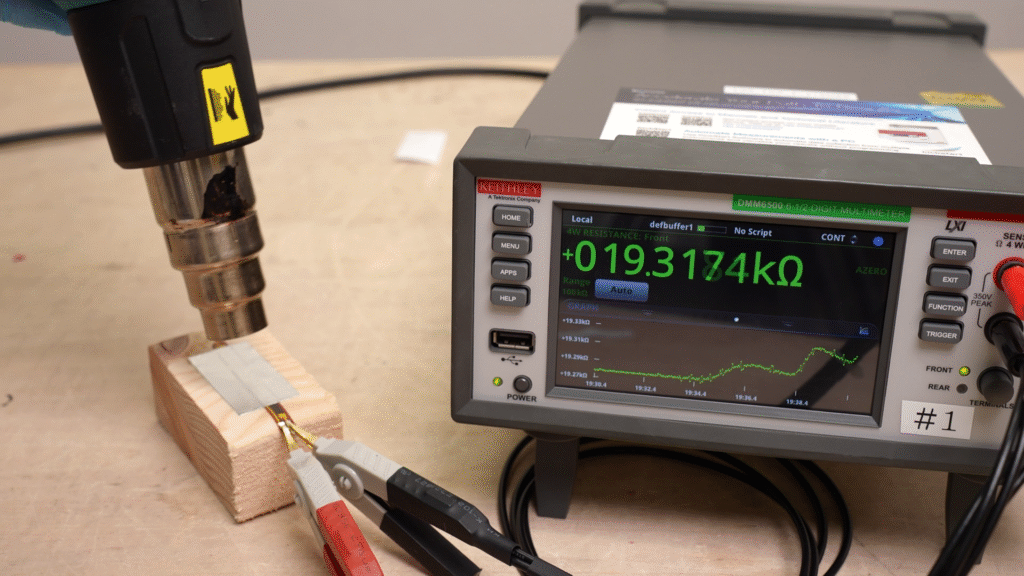
抵抗値の変化のみを測定している計測器やマイコンから見ると、その抵抗値の変化が温度変化によるものか、物理的な変化によるものかを分けて考えることは困難です。
したがって高い精度で計測するためには、抵抗体の温度を測定しながら、それを元にリアルタイムで補正を行うなどの対策が必要になります。
また、抵抗値と角度の関係性がどのようなものになっているのかも考慮する必要があります。
理想としてはこの関係性は線形(リニア)である方が望ましいですが、実際にはそうではない場合が多いです。これはソフトウェアである程度対応することができます。
静電容量式
続いて、静電容量を利用した曲げセンサーについて紹介します。

こちらは日東電工の製品で、同社では「フレキシブルセンサ」という製品名で販売されています。
この製品は曲げの変化だけでなく、伸び方向の変化も計測することができます。
このデバイスが「曲げ」という物理的な変化をどのように計測しているのかを、実験を通して解説していきます。
動作原理
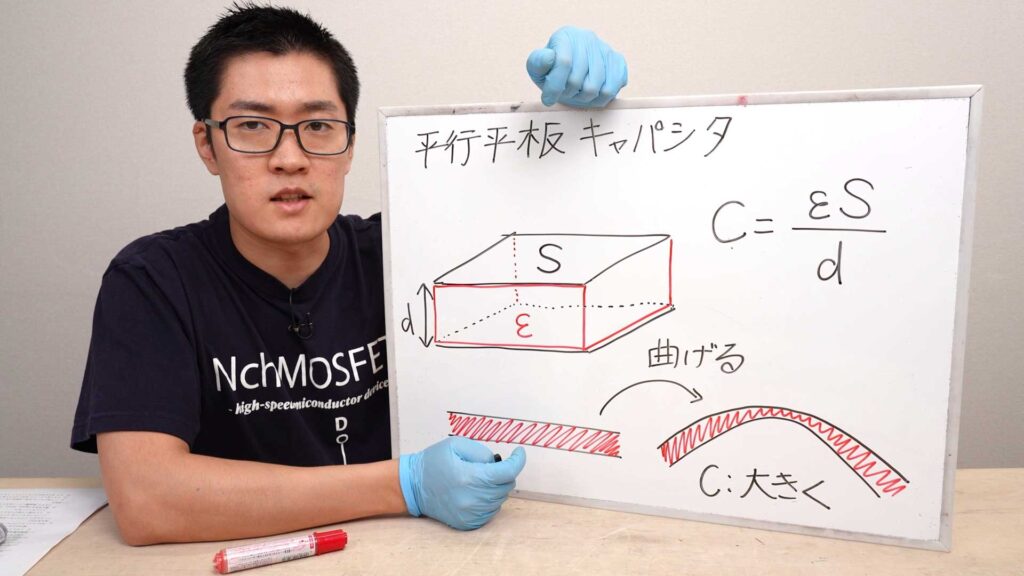
この種の静電容量式曲げセンサーは基本的に並行平板キャパシタと同じ構造をしており、その静電容量\(C\)はコンデンサの電極の面積\(S\)、電極間距離\(d\)、そして誘電率\(ε\)の3つのパラメータで決まります。
一般的な並行平板キャパシタでは、2つの板の電極間距離\(d\)が大きくなると静電容量\(C\)は減少し、電極間距離\(d\)が小さくなると静電容量\(C\)は増加します。
曲げセンサーの動作を模擬するため、曲げセンサーの素子を模した並行平板コンデンサの模型を作ってみました。アルミホイルで作った電極の間にスポンジを挟み込み、電極間の距離を変化させることで、静電容量が変化する様子を観察します。
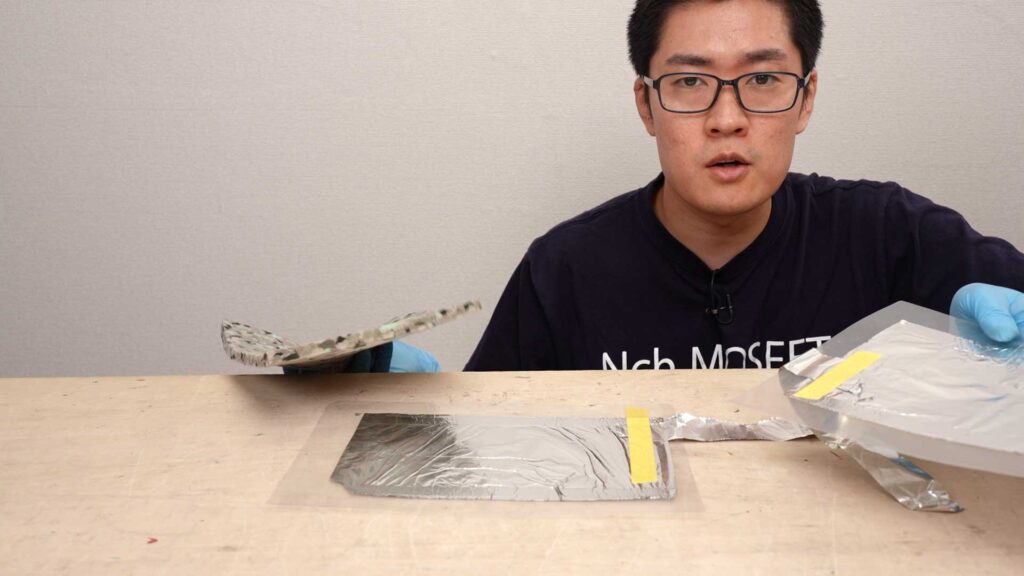
この並行平板コンデンサの一部を押しつぶしてみます。するとコンデンサの電極間距離\(d\)が短くなり、結果的に静電容量\(C\)は増加します。

この電極間距離\(d\)が近づいて静電容量\(C\)が変化した状態が、センサーが曲がった状態に相当します。
日東電工のフレキシブルセンサも、素材などは異なりますが、基本的な動作原理はこの模型で示したものと同様のものになっています。
この静電容量方式を採用した日東電工のフレキシブルセンサでは、シリコーン状の材質の母材の表面にコンデンサの構造が形成されており、折り曲げる方向によって値が初期状態から正負方向に振れ、折り曲げ方向を判別することができます。
またセンサーを引っ張ると、静電容量が大きくなっていることが確認できます。これはセンサーが伸びて薄くなったことで電極間距離\(d\)が近くなるためです。

このセンサーは、上記のような特性を持った並行平板コンデンサを2枚重ねた構造になっており、それぞれの同相の信号と差動の信号から、伸びと曲げを別々に計測することができます。

フレキシブルセンサの評価キットを使ってみる
日東電工から提供していただいた評価キットを使ってみます。各種ECサイトにて入手可能です。
これはフレキシブルセンサ本体に加えてADコンバータとマイコン、バッテリがセットになった製品で、Bluetoothでスマートフォンに接続することで簡単にWebアプリ上で数値を確認することができます。

角度計測について
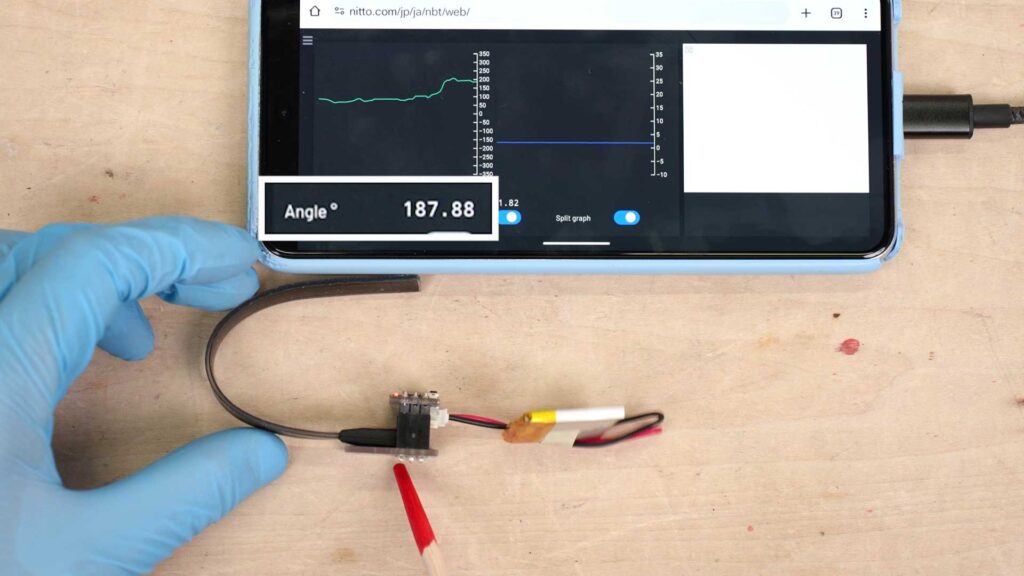
このWebアプリは、曲げ角度を度数で表示することができ、また同時に数値が時間軸でプロットされ、角度をグラフとして可視化することもできます。
曲げと伸びのグラフを分けて表示するようにしました。左の緑線のグラフが曲げ、右の青線のグラフが伸びをそれぞれ表しています。
センサーをまっすぐにした状態を0°として、そこからセンサーを曲げていくと、それに応じて表示されている角度の数値がリアルタイムに増減していきます。また、逆方向に曲げた場合でも、同様に負の数値で角度が検出されて表示されることを確認できました。
また、日東電工の製品ラインナップには上下方向だけでなく左右方向の曲げも計測できる2軸のセンサーもあります。
Webアプリで、上下軸のグラフと左右軸のグラフを分けて表示するようにしました。
例えば2軸センサーの先端を持って円を描くように曲げると、各軸の数値を同時にプロットしたグラフに位相が90度ずれたsin波とcos波のような波形が描かれる様子が見て取れます。
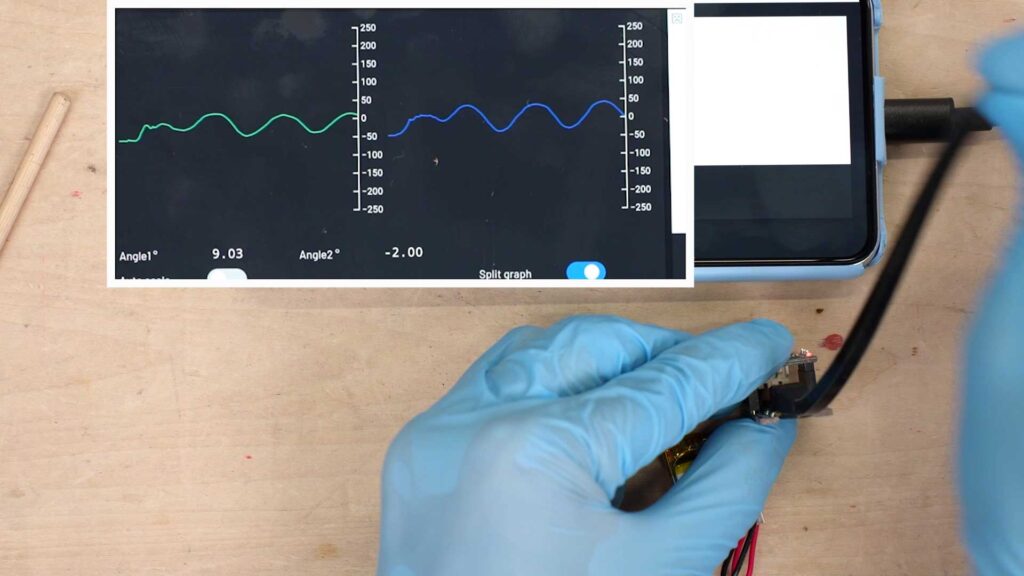
センサーが2軸になることで1軸に比べて利用の幅が大きく広がり、なかなか興味深いセンサーであると感じました。
伸長計測について
この静電容量式のセンサーでは曲げの角度の計測に加えて、伸び(ストレッチ)の計測にも対応しています。
フレキシブルセンサを実際に伸ばして、表示される計測値がどの程度正確かを確認しました。
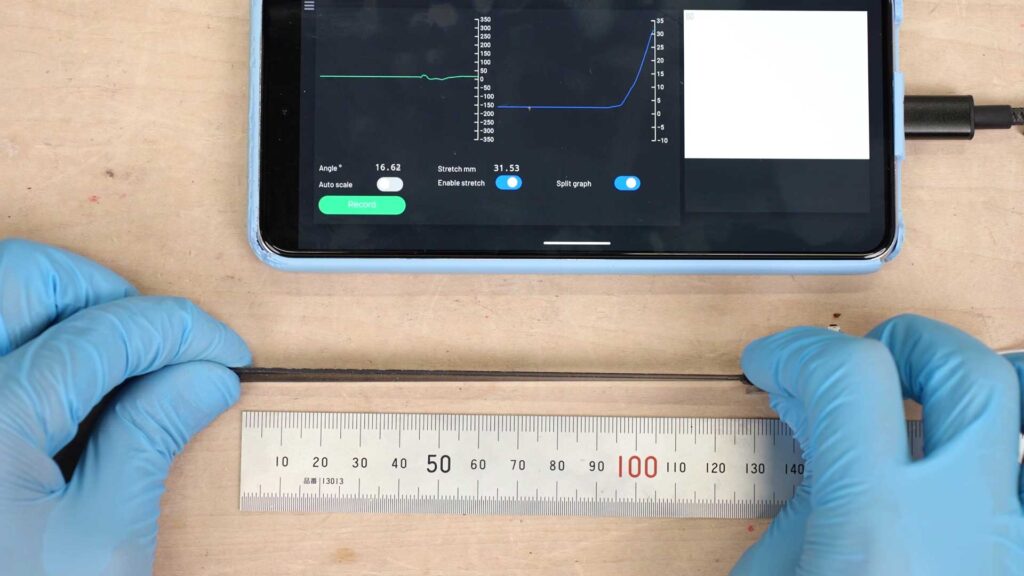
この画像は、センサーを伸ばしていない状態で表示されていた1.8mmを初期値として、センサーを30mm伸ばした様子です。計測値は31.5mmと表示されています。
以上の結果から、伸長が正確に計測されていることが確認できました。
温度特性について
抵抗式曲げセンサーと同様に、加熱した場合の挙動を確認してみます。
今度は曲げ(グラフの緑線)と伸び(グラフの青線)を重ねて表示するようにしました。
リフロー用ホットプレートの上にセンサーを平らな状態で置いて加熱していくと、曲げの角度の値が徐々に上昇していく様子が観察できました。
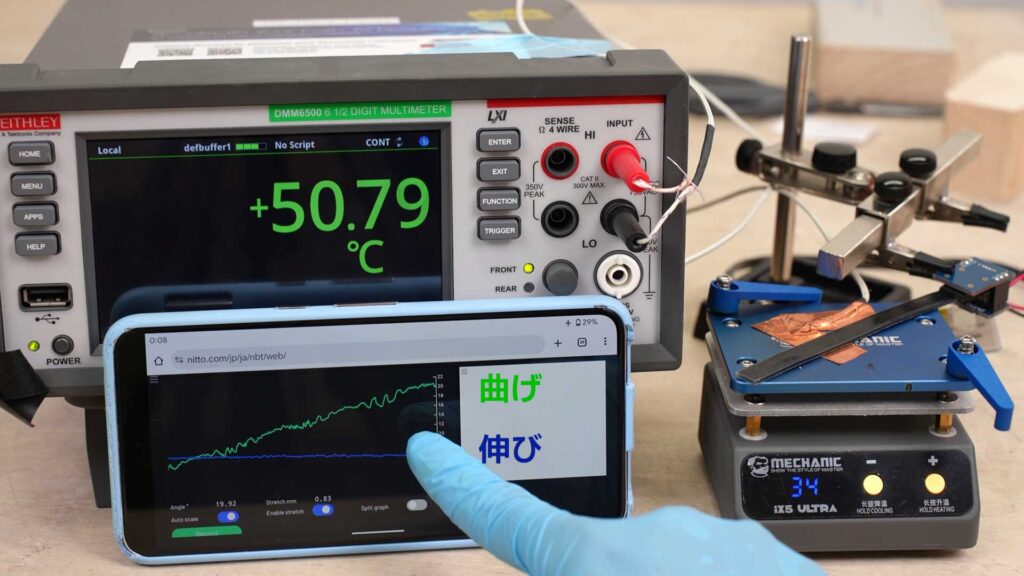
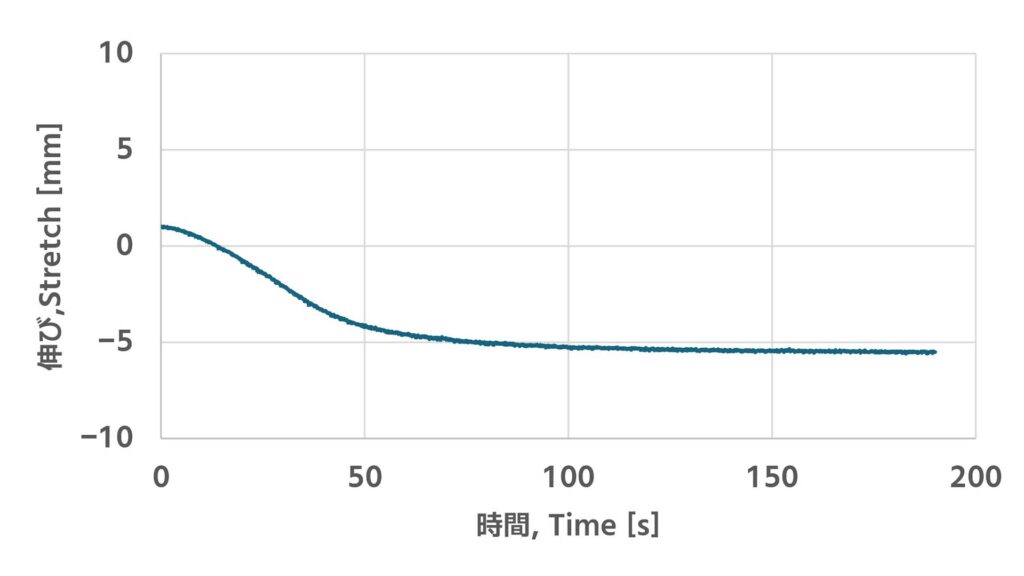
リフロー用ホットプレートで100℃に加熱したときの、曲げと伸びの数値を時系列プロットしたグラフを以下に示します。
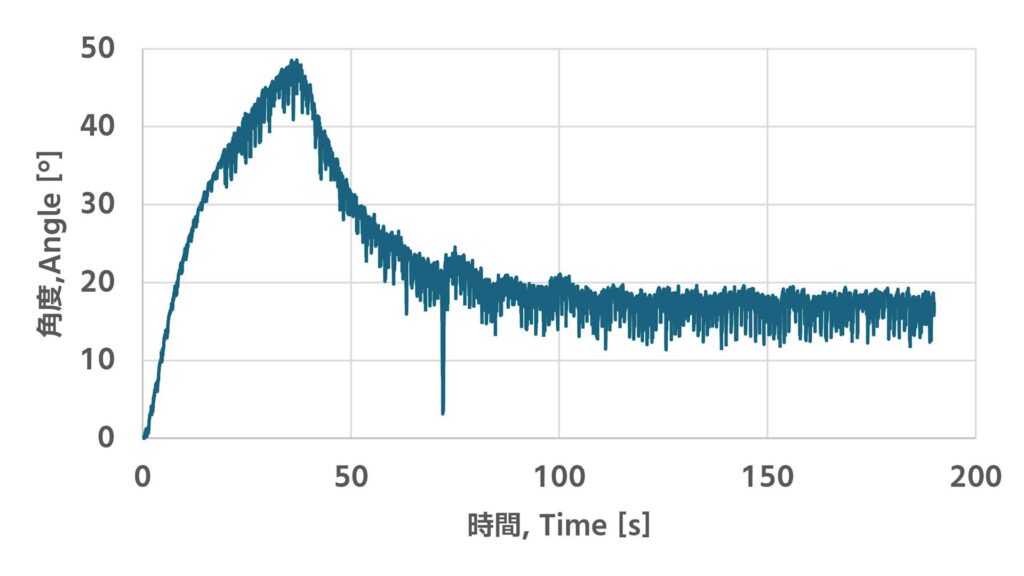
曲げのグラフを見ると、実験序盤は温度上昇に従って角度のドリフトが大きくなり、ピークでは50°近くまで広がっています。しかしその後途中から、徐々に低下していって約18°で落ち着くという結果になりました。
これはつまり、センサの片面だけを熱したことによってセンサの両面に温度差が発生し、曲げ方向のドリフトが発生していることを意味します。その後ある程度の時間が経過すると、裏面と表面の温度が平衡していき、ドリフトが小さくなっていく様子が観察できました。
一方で、伸びの数値では違った傾向が見られました。ピークが発生することはなく温度上昇に従って縮む方向にドリフトし、約-5mmで平衡する様子が観察できました。
片面を加熱する実験では、センサーの各面の温度差によって曲げ方向のドリフトが発生する様子が確認できました。ということは、両面の温度差がなければ曲げ方向のドリフトは発生しないはずです。
次の実験では、熱湯の中にセンサーを浸してみました。これにより、先程のホットプレートと違って、センサー全体を一様に温めた場合のドリフトの変化を観察することができるはずです。

センサー全体が熱湯の温度と平衡した状態で状況を確認したところ、仮説通り角度(グラフの緑線)については角度が0°付近でほとんどオフセットが出なくなった一方で、伸び(グラフの青線)については初期状態と比較して-4mm程度のドリフトが発生しました。
この結果は、センサー自体の構造および計測方法に起因し、先程も述べたとおり2枚重ねのキャパシタの静電容量の共通モード信号と差動信号を計測しているためです。
これは製品のデータシートにも記載があります。
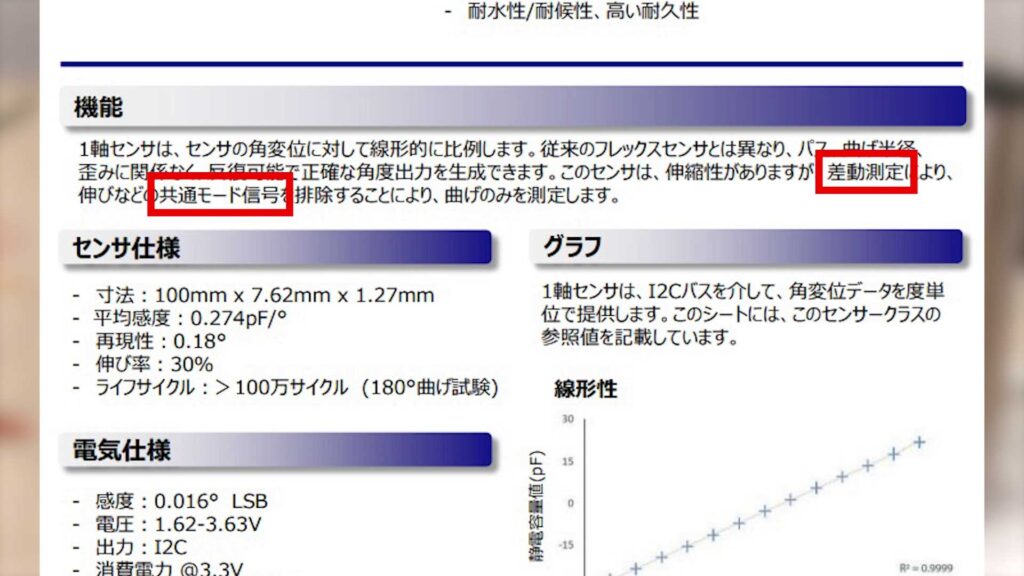
したがって、全体を均一に加熱すれば同相の信号が発生するため伸び方向のドリフトが発生し、同様に片面のみを加熱して温度差が発生した場合、信号の差動が大きくなって曲げのドリフトが発生します。
この点に関しては、特に発熱する物体に直接センサーを貼り付けて設置するシチュエーションでは注意が必要です。
工作例
このセンサーを使って、簡単な工作をしてみました。
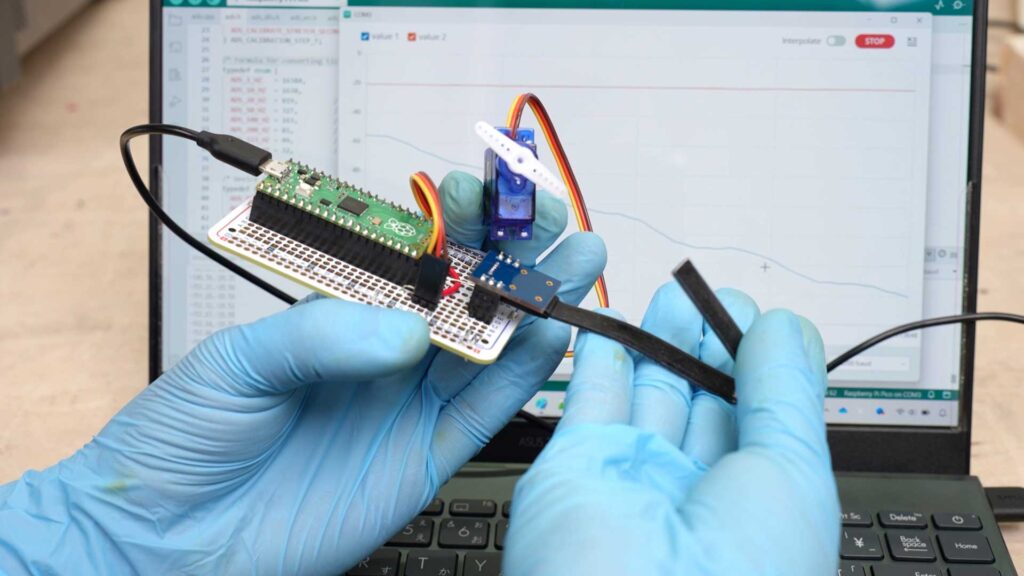
マイコンでフレキシブルセンサの数値を取得し、それに追従してサーボモータを動かすデバイスです。
センサーのA/D変換部分からはI2Cで数値を取得することができます。このデバイスでは、マイコンボードRaspberry Pi Picoでセンサーの曲げの数値を取得し、それに対応したデューティ比のパルスを出力してサーボモータを制御しています。
ArduinoIDEで使用可能なライブラリやI2Cの仕様については、以下のGithubリポジトリにて公開されています。日東電工傘下で、今回紹介したフレキシブルセンサの開発元であるNitto Bend Technologies, Inc(旧BendLabs, Inc)のリポジトリです。

まとめ
今回、抵抗式曲げセンサーと静電容量値式曲げセンサーの両方を紹介し、それぞれの特性を比較しました。
実験を通して、両者には明確な違いがいくつかあることいがわかりました。
抵抗式曲げセンサーは曲率の大きい曲げ方をした場合に内部の抵抗体の部材が壊れてしまう可能性があります。その一方で、今回紹介した日東電工の静電容量式の製品「フレキシブルセンサ」ではシリコーン状の材質で柔軟性があり、抵抗式では破損するような曲げ方をしても壊れることはありません。
もちろんいずれのセンサーも、仕様の範囲内であれば、どちらも実用上十分な耐久性を持っているはずです。
また、フレキシブルセンサでは伸長の計測も可能なのに対して、今回検証に用いた抵抗式曲げセンサーでは伸長計測はできません。抵抗式かつ伸長測定が可能な製品は、私が探した限りでは見つかりませんでした。
線形性については、ソフトウェアによる補正がある程度可能であることなどから今回は未評価としました。
| 抵抗式 | 静電容量式 | |
|---|---|---|
| 曲げ耐久 | ◯ | ◎ |
| 伸び | △ | ◯ |
| 線形性 | – | – |
物体の曲げを計測する場合、曲げセンサー貼り付け面の温度や、伸びの有無、コストなどに加え、そもそも計測対象は「曲げ」なのか「角度」なのかという点についてよく検討したうえで、適切なセンサーを選択する必要があるということがわかりました。
本記事の内容は、動画でも公開しておりますので、ぜひそちらもご覧ください。






コメント