前回の記事で、バネーマスーダンパモデルをシミュレーションする回路が設計出来ましたので、今回は実際に回路CADでの基板設計から実際のプリント基板の発注、作成をして、現実の物理モデルと比較していきたいと思います。
回路設計
今回実際に制作する回路図がこのような形になっています。
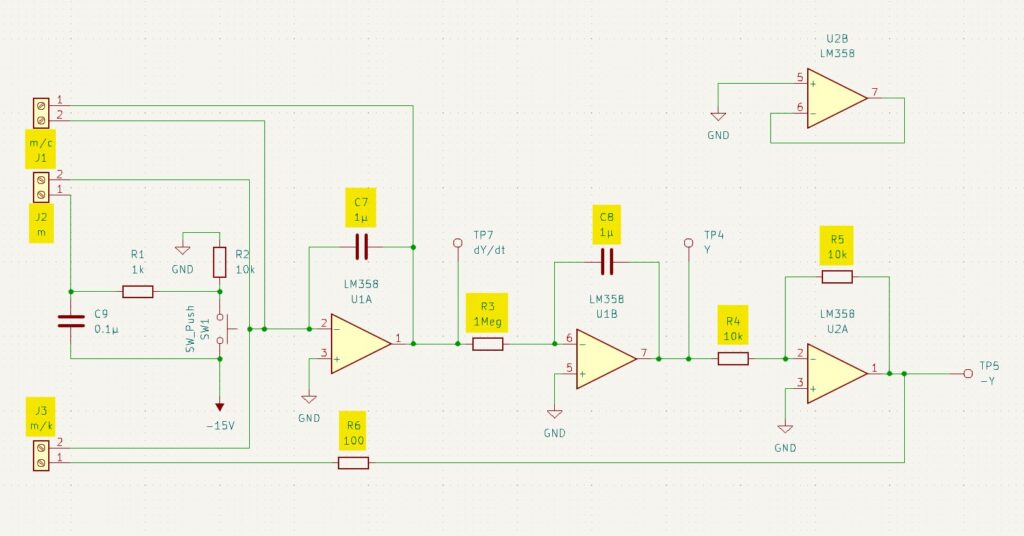
今回制作するアナログコンピュータの回路で重要になってくる、主な部品の役割と定数が次のとおりとなっています。
- C7 : 1[μF]
- 一段目の積分器用
- C8 : 1[μF] R3 : 1[MΩ]
- 積分回路の時定数を1にする
- R4, R5 : 10[kΩ]
- 出力を1倍の反転増幅回路に通すための抵抗
- J1 : 1[MΩ]
- 減衰の設定
- J2 : 250[kΩ]
- 重力加速度と重りの重さの設定
- J3 : 10[kΩ]
- ばね係数の調節
- R6
- J3の抵抗値が0[Ω]になった際、出力が短絡するのを防ぐ抵抗
可変抵抗の抵抗値は前回LTspice上でシミュレートした結果と、この後の実際の実験を繰り返しながらちょうどよいものを選定した結果になっています。また、今回の電子回路で行っている計算についての基礎的な解説や、回路全体の解説については前回の記事にまとまっていますので、是非そちらもご覧ください。
基板の作成
基板エディタで設計

今回はこのような基板を設計しました。回路図については前回の記事にあるものと同じです。
オペアンプを3つ使う仕様のため、2回路入りのオペアンプを2つ使用しています。使わない1回路については非反転入力端子をGNDに落とし、出力と反転入力端子を直結してボルテージフォロワとしておきましょう。
PCB業者に発注していたものが完成
今回も設計したデータを中国のプリント基板業者に発注しました。発注から大体5日ほどで到着しました。
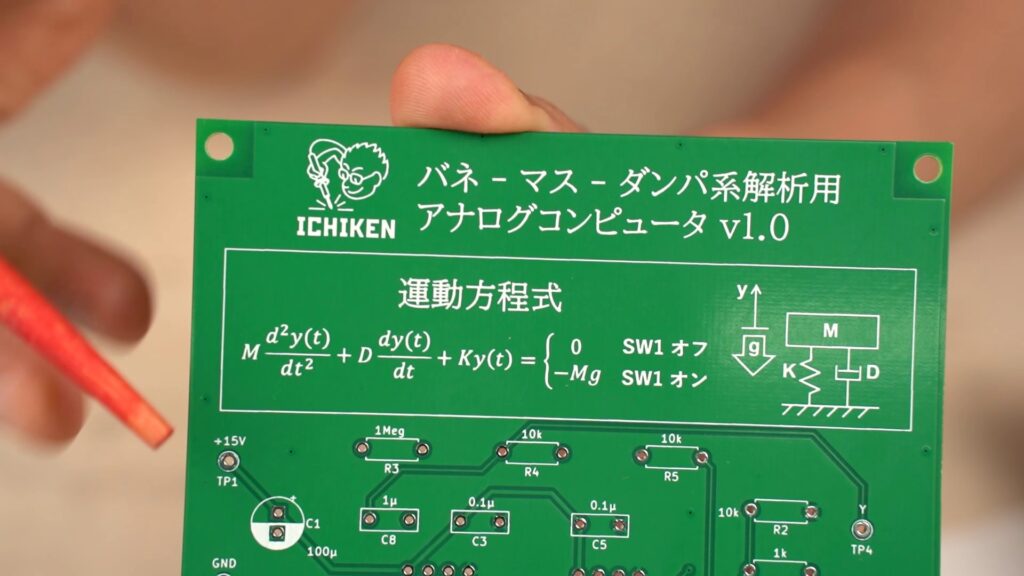
基板をよく見てみます。まず上部ですが、今回のアナログコンピュータで計算する運動方程式と、その計算モデルをイラストで描いてみました。結構きれいに印刷できています。
また、左上のロゴに関しては最近イチケンチャンネル公式ロゴとして新たに作成したものです。当ブログのタイトルロゴも最近更新されたほか、今後も色々な所で目にすることがあるかと思います。
基板の右下にタクトスイッチが実装されていて、ここが押されているあいだシミュレーションが走ります。
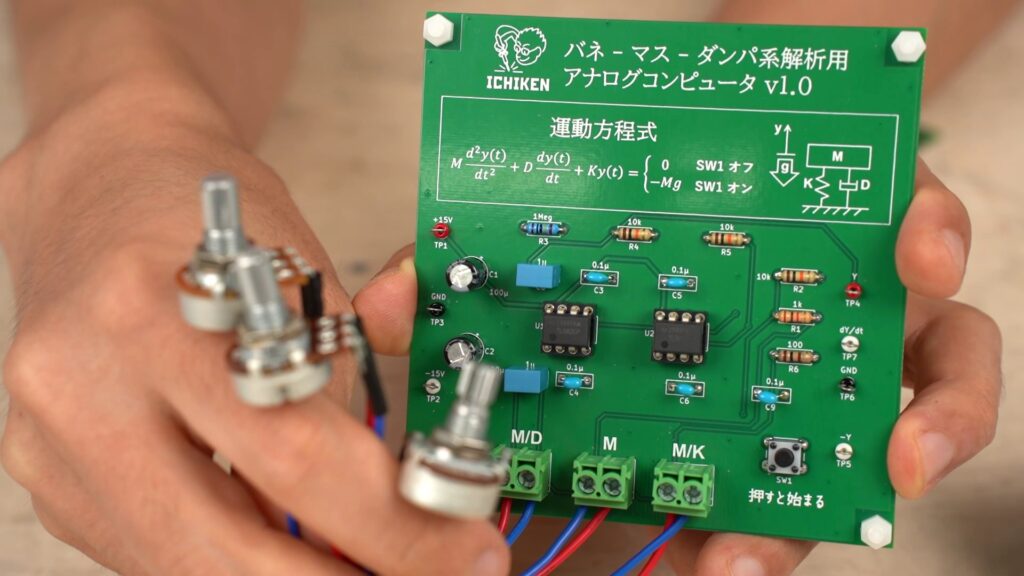
計算の各定数を変化させるための可変抵抗ですが、今回は2端子ターミナルで引き出すような設計にしています。定数によって抵抗値を大きくした場合に影響が大きくなるものとその逆のものがありますが、可変抵抗の3本の足のうちどの2本を使用するかで対応できます。
なお、可変抵抗の余った端子は中央の端子とリード線か何かで短絡させておくと動作が安定します。
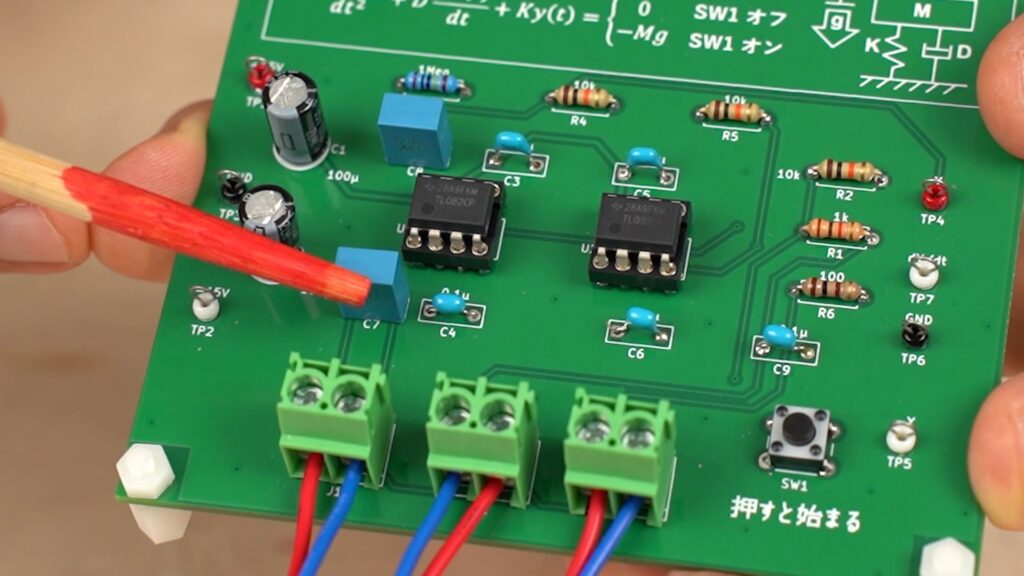
回路に直接作用する部分のキャパシタにはMLCC(積層セラミックコンデンサ)ではなくフィルムキャパシタを採用しました。MLCCでは使用する電圧が変化した際に見かけ上の容量が変化してしまうからです。フィルムキャパシタではその辺りの特性が優れています。
また、オペアンプ用の電源には±15Vを使用します。今回は実験用の基板ですのでテストポイントにクリップをつけて電源を供給するような実装にしました。
基本的な動作確認
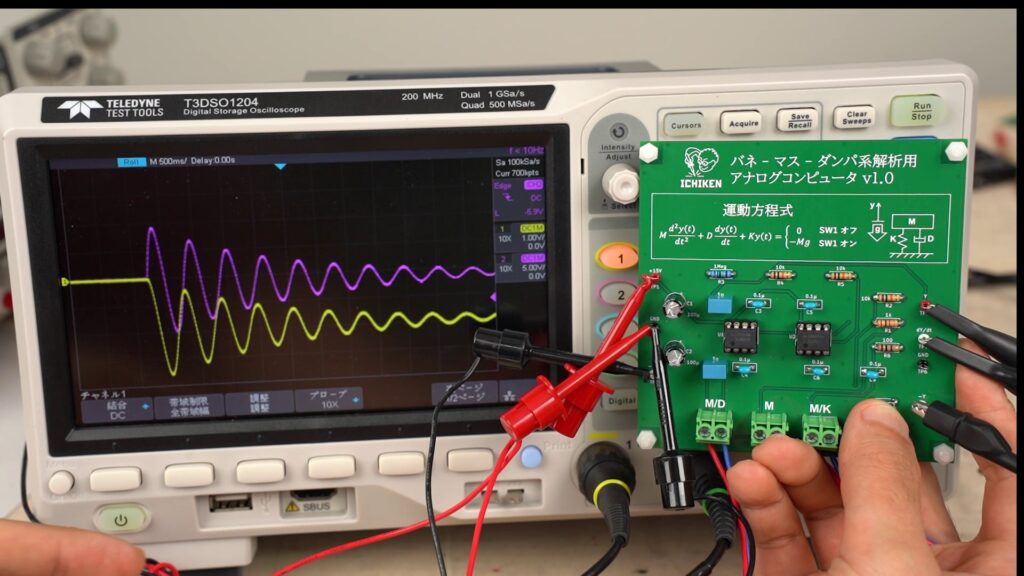
実際に基板が組み上がりましたので、出力の波形をオシロスコープで見ながら実験をしていきましょう。
オシロスコープの黄色い波形がシミュレーションの出力(おもりの位置)、ピンク色の波形が速度の部分を表しています。
前回の記事で行ったソフトウェアシミュレーションの通り、初期の状態ではおもりの位置は中央にありますが、スイッチを押してシミュレーションが開始されるとおもりが振動を始めてて、そして一定の位置に収束していくことが分かるかと思います。動作としては成功です。
3つある可変抵抗はそれぞれ
- ダンピング
- おもりの重さ
- ばね定数
の定数を変えられるようになっています。それぞれ変化させるとどの様になるのか見ていきましょう。
減衰(ダンピング)を変えてみる
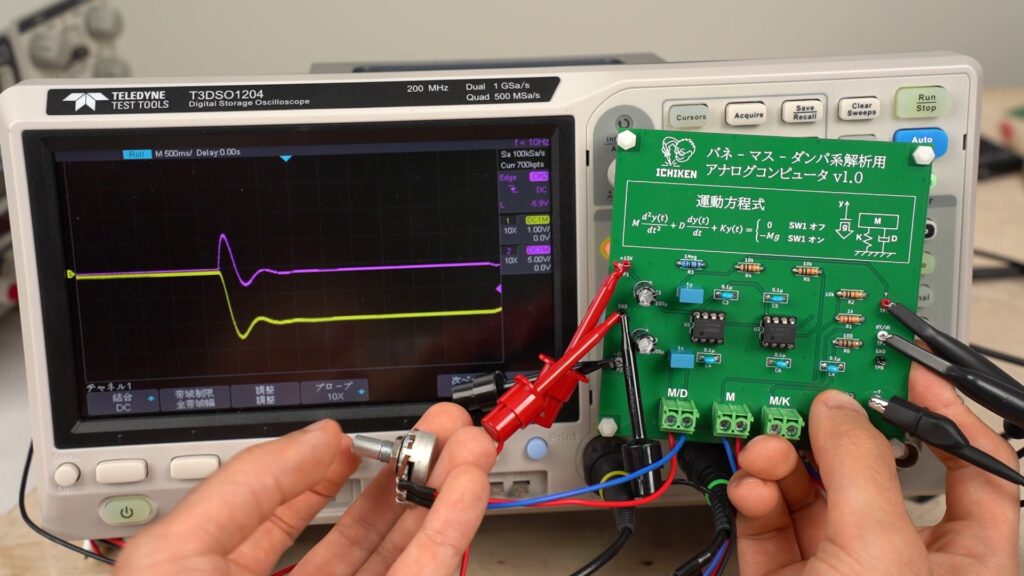
こちらがダンピング定数を変えてみたときの挙動です。定数を高くするとダンピングが強くかかるようになります。
左側の通常の振動波形に比べて、一瞬で振動が収まっているのがよく分かるかと思います。
おもりの重さを変えてみる
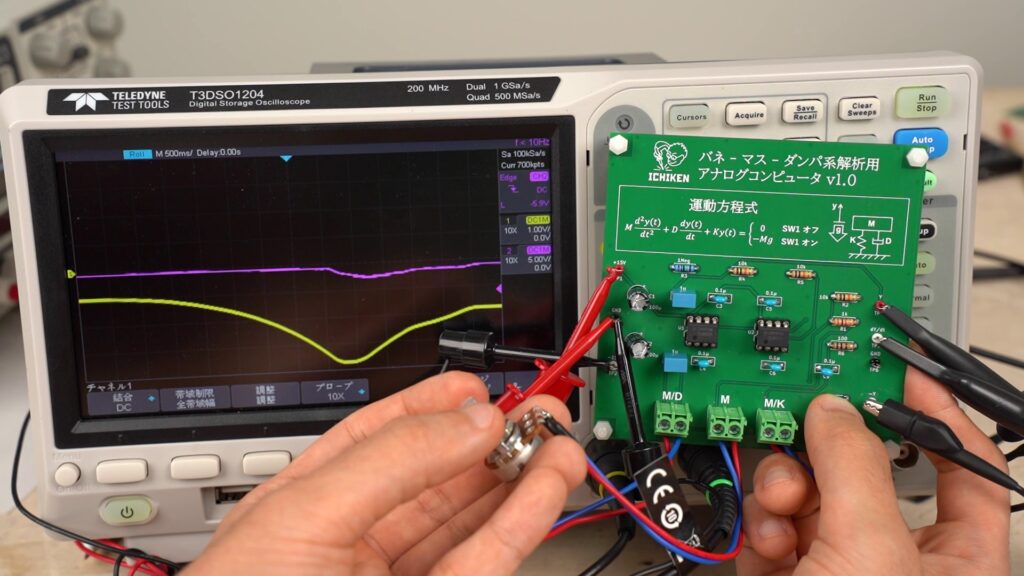
次に重さの定数を変えてみます。これはバネにぶら下がっているおもりの重さが変わった状況を表しています。
おもりが重くなれば当然ですがバネの伸びる長さは長くなります。反対に、重さの定数が小さくなる≒バネが伸びる長さが短くなるといった動作になります。
ばね定数を変えてみる
ばね定数はバネが伸縮しようとする強さです。動作的にはおもりの重さを軽くしたのと同じような挙動となります。
ばねを強くするとおもりとの釣り合いの位置が上に上がっていくような形になります。
現実との比較実験
ここまで、自作したアナログコンピュータでバネ-マス-ダンパモデルが狙い通りに実行できていることがわかりました。
これを実際の物理現象とどのくらい一致しているのかを比較するために、ばねにおもりをぶら下げて水槽の中で振動させる実験も行いました。
実験器具の紹介
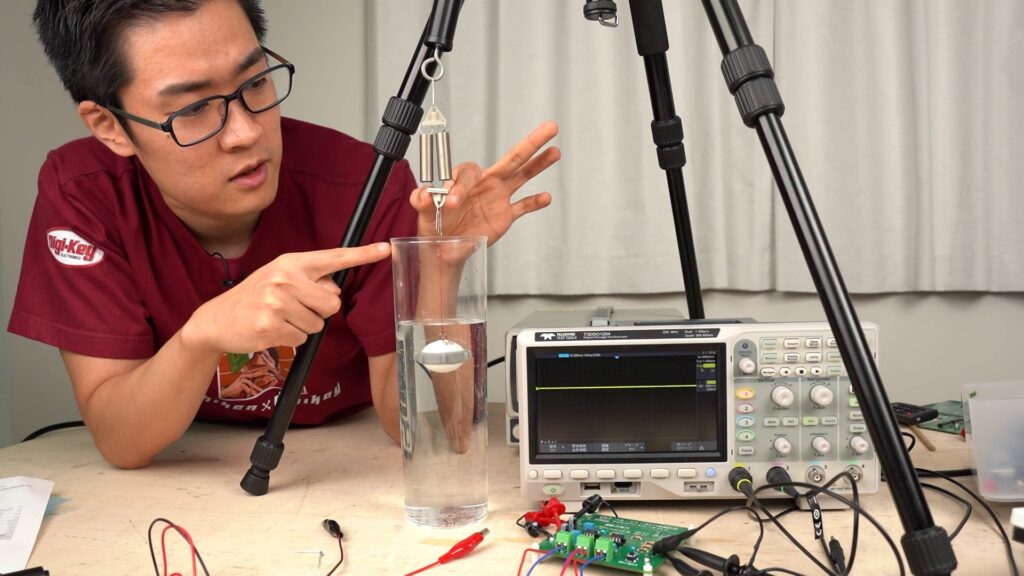
こちらが実験の様子になるのですが、最初は空気中で実験していたところ空気抵抗だけではいつまでも振動が止まらないという自然現象に悩まされました。 色々悩んだ結果、 スタッフのアイデアで空気よりもっと粘性の高い流体である水の中で実験をすることにしました。
また、おもりの挙動を安定させつつ少しだけ減衰を増やすためにリング状のパーツも3Dプリンタで作成して、おもりにはめています。スタッフがさっくりと作ってくれました。
アナログコンピューターで同じことが出来るか
ばねに吊り下げたおもりを、バネが無負荷時の自然長となる位置まで指で持ち上げて、パッと離します。それと同時にシミュレーションを開始して現実の挙動をシミュレーションできるかを確認します。
先程解説したそれぞれの定数を調整しながら実際の動作に近づけていくわけですが、実物の周期とアナログコンピュータの振動周期が一致するようにバネとおもりの定数を調整して、そして振幅が減衰するまでの時間をダンピングの定数を調整して対応します。
こちらがうまく調整できたときの様子です。ほとんど同じ周期で振動していて、そして同じ経過時間で振動しなくなっていく様子が分かるかと思います。
このように各定数を簡単に調整するだけで実際の物理モデルと同じようなシミュレーションを行うことが出来るのがアナログコンピュータ最大のメリットとなります。実際の実験装置のバネを取り替えたりするのは時としてとても大変ですが、このすぐに調整できてかつリアルアイムに見て取れるのはアナログコンピュータならではの特長です。
アナログコンピューターの課題点
ここまでアナログコンピュータをオペアンプを使った電気回路で設計、基板の作成から実際の現実の物理モデルと同じ挙動が取れるかを実験してきました。これについては成功でした。
ただ、アナログコンピュータにもいくつか欠点があります。それぞれ次のような内容です。
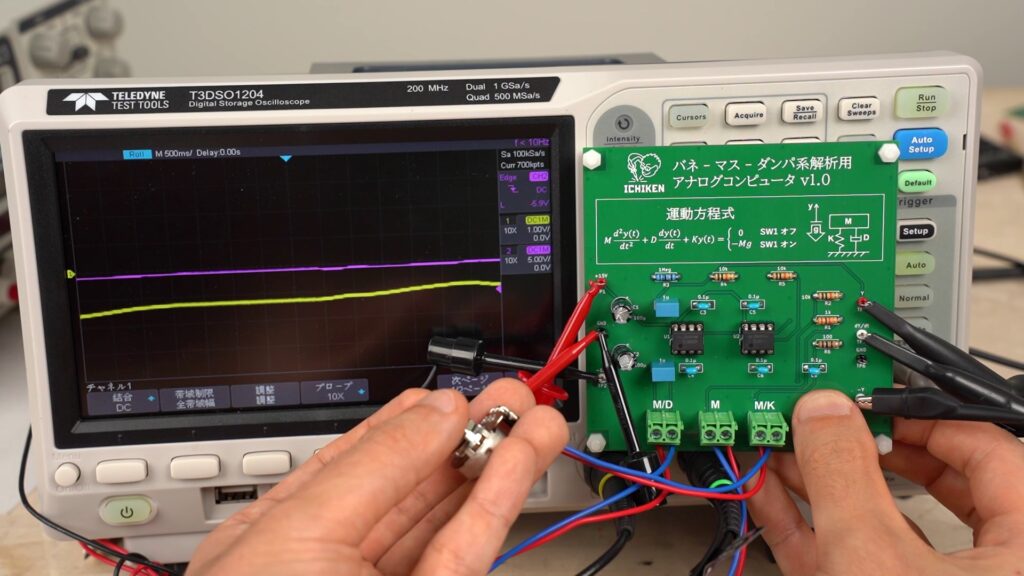
ダイナミックレンジの限界
これは電気的に計算を行うアナログコンピュータ全般に言えることですが、今回のようにオペアンプを使用した場合、計算の結果がオペアンプの出力可能な電圧の範囲に収まっていないと、正しく計算が出来ないことになります。
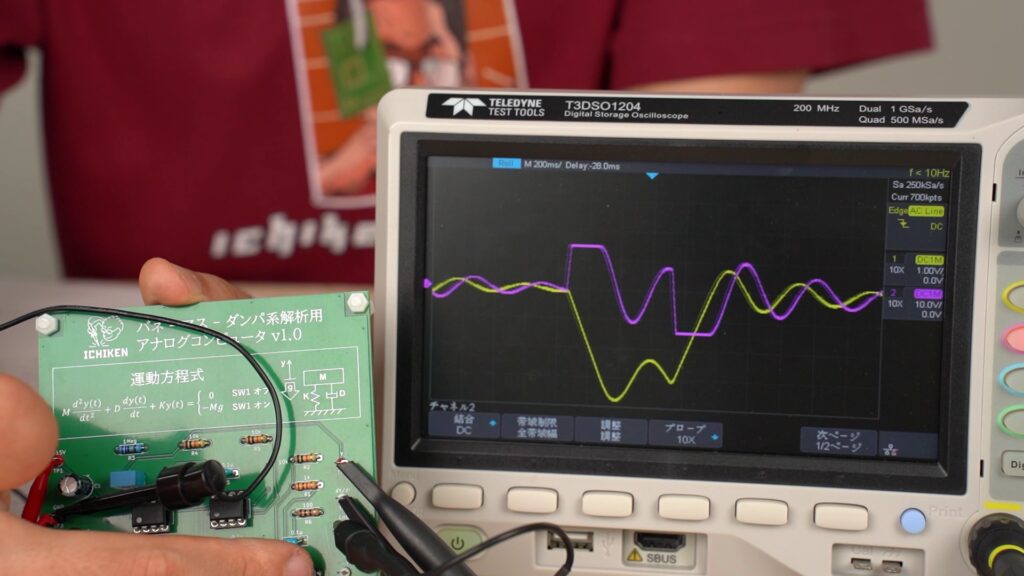
この画像で速度を表すピンク色の波形が頭打ちになっている部分が電圧が飽和してしまっている部分です。正しくシミュレーションができていませんので、定数を調整して速度が使用できる電圧の上限を超えないようにする必要があります。
つまり、シミュレーションに使用する定数の設定範囲が限られてしまいます。
ノイズの問題
アナログコンピュータでは電圧で入力されたアナログの量をそのまま回路内で計算に使っています。そのため、電源からのノイズや、回路以外の部分から受けるノイズが入ってしまうと、その分だけ精度が落ちたり計算結果がズレたりします。
また、出力電圧を入力電圧に入力する形で使っているため、誤差は蓄積されるような形となり、計算をする上では非常に厄介な存在となります。
部品の誤差について
使用する部品の誤差によっても計算結果が正しくなくなってしまうというのもアナログコンピュータの欠点の一つです。
今回使用した部品のうち抵抗などは製造誤差1%や0.1%など比較的精度の高い部品も存在しますのでそれを使えば良いのですが、キャパシタについては5%誤差のものが標準となっているなど、精度に不安が残ります。
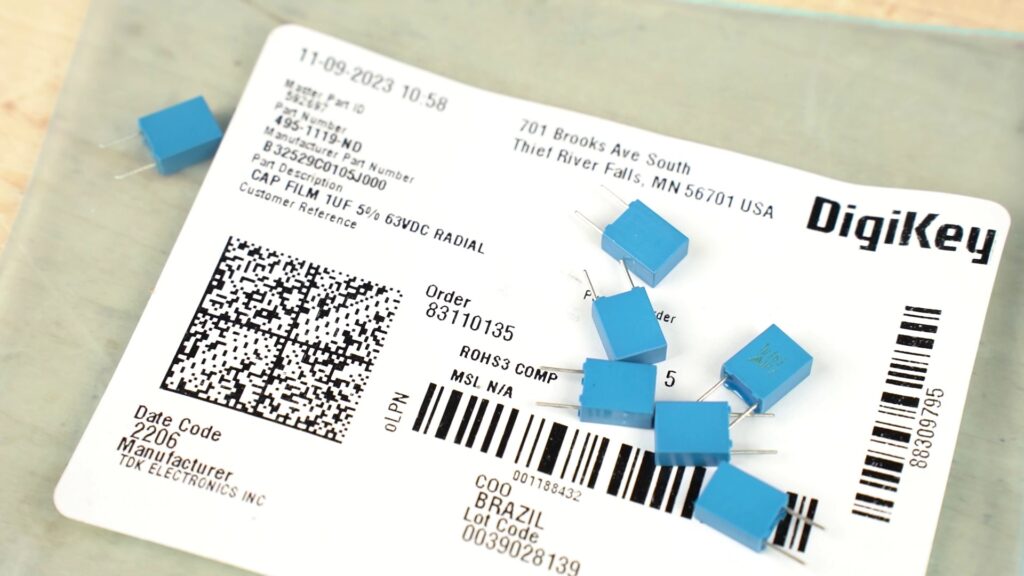
これを解消するためには同じ部品を使用する数以上に大量に購入して、目的とする容量になるべく近いものを選別するしかありません。
まとめ
ここまでアナログコンピュータを実際の電子回路で作成してみました。色々と欠点はありますが、電子回路についての知識だけではなく物理の勉強もできるため非常に面白く、有意義な実験でした。
なにより、波形が動くなど、実際に触っていて楽しいのがアナログコンピュータです。回路規模としても簡単な構成で実現できますので、みなさん是非参考にして下さい。
今回の記事の元となった動画も是非併せてご視聴下さい。
【追記 : 2023/10/03】
回路設計のパートを追記しました。





コメント